首頁 > 產品資訊-全數位運動控制系列 > EtherCAT運動控制平台(EMP)
EtherCAT運動控制平台(EMP)
簡介
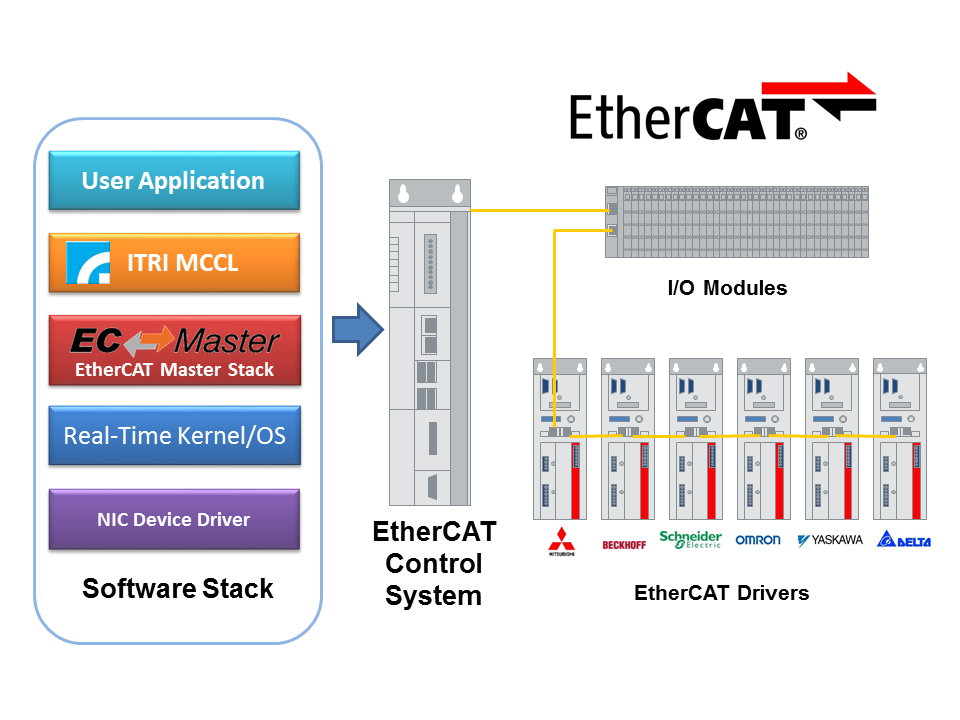
工研院開發之EtherCAT運動控制平台(EMP),以具有Real-time特性之Ethernet為基礎,使用者可以透過此平台與EtherCAT從站(伺服驅動器、I/O等) 連結,有別於傳統運動控制系統,EMP不需額外的硬體,只需透過標準網路卡即具備多軸運動控制能力,並在配線上具有彈性及靈活等優勢。
此外EMP支援DC(Distributed Clocks)模式,可以讓各從站間同步誤差小於1μs。
EMP以即時作業系統為基礎執行CANOepn Over EtherCAT(CoE)協定,提供一相容於EtherCAT通訊協定的運動控制函式庫(MCCL),在伺服驅動控制及I/O控制部分,使用者可利用MCCL下達運動命令、讀取目前命令位置、編碼器回授位置、I/O狀態、原點復歸等,快速導入EtherCAT系統。
特色
- 支援EtherCAT伺服驅動器、I/O模組
- 提供運動控制函式庫(MCCL)
- 支援多軸同動運動路徑規劃
- 利用循環傳輸進行多軸同步控制
- 支援關節型機器手臂軌跡規劃(軟體選配)
- 支援CoE (CANOpen over EtherCAT)
- 支援DC模式
主要規格
- 多軸同動
- 原點復歸
- 直線、圓弧、圓、點對點運動
- I/O點控制
- 前、後加減速規劃
- 連續路徑、客製化路徑規劃
- 補償表
- Robot運動學轉換
支援軟體
- 支援Visual C++ / Visual C# .Net
- Windows 10 / Windows 7 (based on RTX)
Servo Driver Support
- YASKAWA、Copley Controls、SANYO DENKI、
HIWIN、Delta、LTi、Panasonic - Others (提供相容性測試)
Network adapter support
- Realtek 8139 / 8169 / 8111 series
- Intel Pro 100 i8255x / Pro 1000 i8254x
文件下載
產品業務諮詢
聯絡人:工研院 黃靜宜 小姐
聯絡電話:03-5916645
傳真電話:03-5820454
e-mail:JingYiHuang@itri.org.tw
地址:新竹縣竹東鎮中興路四段195號11館285室