首頁 > 應用案例-IMP系列 > 可重組機器人生產系統
應用案例-IMP系列
可重組機器人生產系統
概述
本計畫將使用六軸機械垂直關節型機械手臂多自由度彈性,以解決目前生產線上配合多樣化生產,換線動作頻繁問題。
差異性分析
由於目前市面上機械手臂運動軸卡多為國外產品,受限於國外大廠限制,開發彈性不大。
技術內容
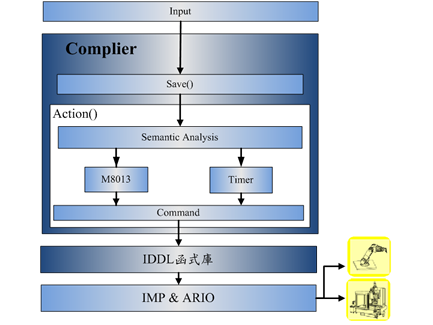
- 具機械手臂座標轉換模組,使用者可撰寫專屬之座標轉換演算法
- 可彈性提供客制化運動函式功能,例如Dynamic Blending、Customer motion 等等
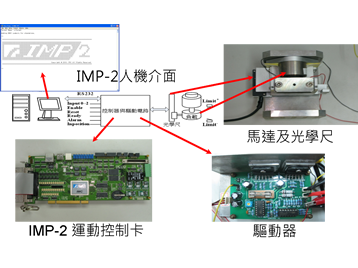
- 搭配非同步遠端輸出入模組(ARIO),完成機器人生產線系統
- 智慧型運動控制平台(IMP)為CPU-Based運算,以解決機械手臂即時性問題,不受PC運算負荷影響控制精度
未來方向與技術價值
機械單體建置的自動化生產系統,搭配相關自動化技術,例如物料搬運,並結合國內自動化工程及設備商,共同建立國內的機器人產業及相關產業體系。
應用單位
工研院機械所 機器人應用系統部。
產品資訊
優惠方案組
IMP-2八軸智慧型運動控制平台
- 贈送八軸馬達轉接板
- 附與運動控制平台連接的100pin&68pin SCSI II Cable
產品業務諮詢
聯絡人:工研院 黃靜宜 小姐
聯絡電話:03-5916645
傳真電話:03-5820454
e-mail:JingYiHuang@itri.org.tw
地址:新竹縣竹東鎮中興路四段195號11館285室